





Mfumo wa Urambazaji uliojumuishwa




Vipengele vya Bidhaa
Mfumo wa urambazaji wa MS100-B0 umejengwa ndani ya gyroscope ya MEMS ya utendaji wa juu na kipima kasi.
Na moduli ya urambazaji ya satelaiti, inaweza kufikia mtazamo wa nje wa usahihi wa hali ya juu, kasi, msimamo
Kipimo.Kwa uwezo wa mchanganyiko wa sensorer nyingi, inaweza kuunganishwa na odometers za nje, speedometers, nk.
Taarifa imeunganishwa ili kudumisha usahihi wa urambazaji wakati GNSS ni batili.
Vipengele vya Bidhaa
-0.1° usahihi wa mtazamo, usahihi wa nafasi ya 2m
- Uwezo wa fusion ya nje ya msaidizi wa sensor
- Aina ya halijoto ya kufanya kazi: -40 ℃~+60℃
- Mshtuko wa juu sana na upinzani wa vibration
- Sehemu ya IP65 iliyofungwa kwa mazingira magumu
- Miingiliano tajiri, inasaidia RS232, RS422, CAN na miingiliano mingine ya kawaida
- Kuegemea juu
Tabia za Umeme
- Ugavi wa umeme: 5V (aina)
- Nguvu iliyokadiriwa: 3W (kiwango cha juu)
- Ripple: 100mV (kilele hadi kilele)
Matukio ya maombi
Kwa kulinganisha programu kwa matukio tofauti ya maombi, bidhaa inaweza kutumika sana katika mashine za ujenzi
Ufuatiliaji wa akili na uwekaji nafasi, mfumo usio na rubani wa kuendesha kiotomatiki, usimamizi wa uwekaji nafasi wa vifaa kwa kiasi kikubwa, kibiashara
drones za viwanda, nk.
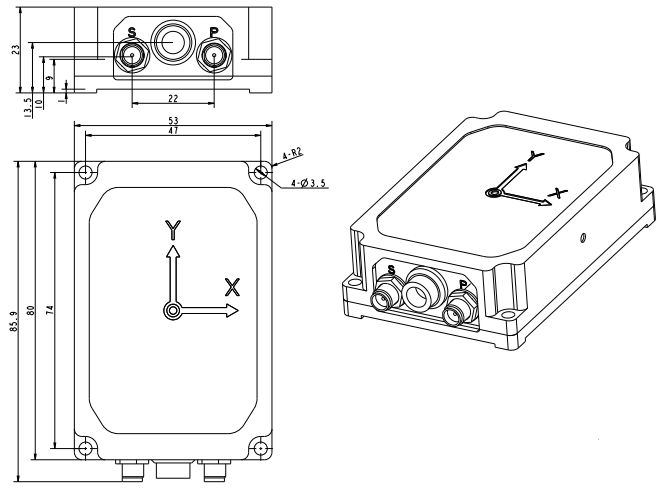
Vipimo vya Mitambo
Viashiria vya kiufundi
| Sifa | Kigezo | Kielezo | Toa maoni |
| Usahihi wa kichwa |
GNSS mbili |
0.1° | 2m Msingi |
| GNSS Moja | 0.2° | Haja ya kuendesha | |
| Baada ya usindikaji |
0.03° |
| |
| Dumisha usahihi | 0.2°/dak | Kushindwa kwa GNSS | |
| Usahihi wa mtazamo | Ufanisi wa GNSS | 0.1° | Sehemu moja L1/L2 |
| Inertia/Odometer Combo | 0.1° (RMS) | Hiari | |
| Baada ya usindikaji | 0.02° |
| |
| Dumisha usahihi | 0.2°/dak | Kushindwa kwa GNSS | |
| Hali ya VG | 2° | Muda usio na kikomo wa kushindwa kwa GNSS, hakuna kuongeza kasi | |
| Usahihi wa nafasi ya mlalo | Ufanisi wa GNSS | 1.2m | Sehemu moja L1/L2 |
|
| 2cm+1ppm | RTK | |
| Inertia/Odometer Combo | 2‰ D (D inamaanisha maili, CEP) | Hiari | |
| baada ya usindikaji | 1cm+1ppm |
| |
| Kushindwa kwa GNSS | 20m | Kushindwa kwa miaka ya 60 | |
| Usahihi wa kasi ya usawa | GNSS inatumika | 0.1m/s | Sehemu moja L1/L2 |
| Inertia/Odometer Combo | 0.1m/s (RMS) | Hiari | |
| Mchanganyiko wa Inertia/DVL |
0.2m/s (RMS) |
Hiari | |
| Gyro | Upeo wa kupima | ±450°/s |
|
| Zero upendeleo utulivu | 2°/saa | Tofauti ya Allan | |
| Kipima kasi | Upeo wa kupima | ±16g | Inaweza kubinafsishwa 200 g |
| Zero upendeleo utulivu | 30µg | Tofauti ya Allan | |
| Kiolesura cha Mawasiliano
| RS232 | 1 chaneli | Chaguo 1 chaneli RS422, chaneli 1 RS232 |
| RS422 | 1 chaneli | Au chaneli 2 RS422, chaneli 1 CAN | |
| INAWEZA | 1 chaneli |
| |
| Uingizaji wa tofauti wa odometer | 1 chaneli | hiari | |
| Pato la PPS | 1 chaneli | hiari | |
| Ingizo la EVENT | 1 chaneli | hiari | |
| Tabia za Umeme | Voltage | 5~36V DC |
|
| Matumizi ya nguvu |
≤3W |
| |
| Ripple | 100mV | PP | |
|
Tabia za muundo | Ukubwa | 80 mm × 53 mm × 23 mm |
|
| Uzito | ≤150g |
| |
|
Tumia mazingira | Joto la uendeshaji | -40℃~+60℃ |
|
| Halijoto ya kuhifadhi |
-45℃~+65℃ |
| |
|
Mtetemo |
20 ~ 2000Hz,6.06g |
| |
| Athari |
30g,11ms |
| |
| Darasa la ulinzi | IP65 |
| |
|
Kuegemea | MTBF | 30000h |
|
| Maisha yote | > miaka 15 |
| |
| Muda wa kufanya kazi unaoendelea |
>24h |
| Sifa | Kigezo | Kielezo | Toa maoni |
| Usahihi wa kichwa |
GNSS mbili |
0.1° | 2m Msingi |
| GNSS Moja | 0.2° | Haja ya kuendesha | |
| Baada ya usindikaji |
0.03° |
| |
| Dumisha usahihi | 0.2°/dak | Kushindwa kwa GNSS | |
| Usahihi wa mtazamo | Ufanisi wa GNSS | 0.1° | Sehemu moja L1/L2 |
| Inertia/Odometer Combo | 0.1° (RMS) | Hiari | |
| Baada ya usindikaji | 0.02° |
| |
| Dumisha usahihi | 0.2°/dak | Kushindwa kwa GNSS | |
| Hali ya VG | 2° | Muda usio na kikomo wa kushindwa kwa GNSS, hakuna kuongeza kasi | |
| Usahihi wa nafasi ya mlalo | Ufanisi wa GNSS | 1.2m | Sehemu moja L1/L2 |
|
| 2cm+1ppm | RTK | |
| Inertia/Odometer Combo | 2‰ D (D inamaanisha maili, CEP) | Hiari | |
| baada ya usindikaji | 1cm+1ppm |
| |
| Kushindwa kwa GNSS | 20m | Kushindwa kwa miaka ya 60 | |
| Usahihi wa kasi ya usawa | GNSS inatumika | 0.1m/s | Sehemu moja L1/L2 |
| Inertia/Odometer Combo | 0.1m/s (RMS) | Hiari | |
| Mchanganyiko wa Inertia/DVL |
0.2m/s (RMS) |
Hiari | |
| Gyro | Upeo wa kupima | ±450°/s |
|
| Zero upendeleo utulivu | 2°/saa | Tofauti ya Allan | |
| Kipima kasi | Upeo wa kupima | ±16g | Inaweza kubinafsishwa 200 g |
| Zero upendeleo utulivu | 30µg | Tofauti ya Allan | |
| Kiolesura cha Mawasiliano
| RS232 | 1 chaneli | Chaguo 1 chaneli RS422, chaneli 1 RS232 |
| RS422 | 1 chaneli | Au chaneli 2 RS422, chaneli 1 CAN | |
| INAWEZA | 1 chaneli |
| |
| Uingizaji wa tofauti wa odometer | 1 chaneli | hiari | |
| Pato la PPS | 1 chaneli | hiari | |
| Ingizo la EVENT | 1 chaneli | hiari | |
| Tabia za Umeme | Voltage | 5~36V DC |
|
| Matumizi ya nguvu |
≤3W |
| |
| Ripple | 100mV | PP | |
|
Tabia za muundo | Ukubwa | 80 mm × 53 mm × 23 mm |
|
| Uzito | ≤150g |
| |
|
Tumia mazingira | Joto la uendeshaji | -40℃~+60℃ |
|
| Halijoto ya kuhifadhi |
-45℃~+65℃ |
| |
|
Mtetemo |
20~2000Hz,6.06g |
| |
| Athari |
30g, 11ms |
| |
| Darasa la ulinzi | IP65 |
| |
|
Kuegemea | MTBF | 30000h |
|
| Maisha yote | > miaka 15 |
| |
| Muda wa kufanya kazi unaoendelea |
>24h |






